UrbANT simulation motion module
Simulation of UrbANT robot with rocker-bogie syspension system and damping effect.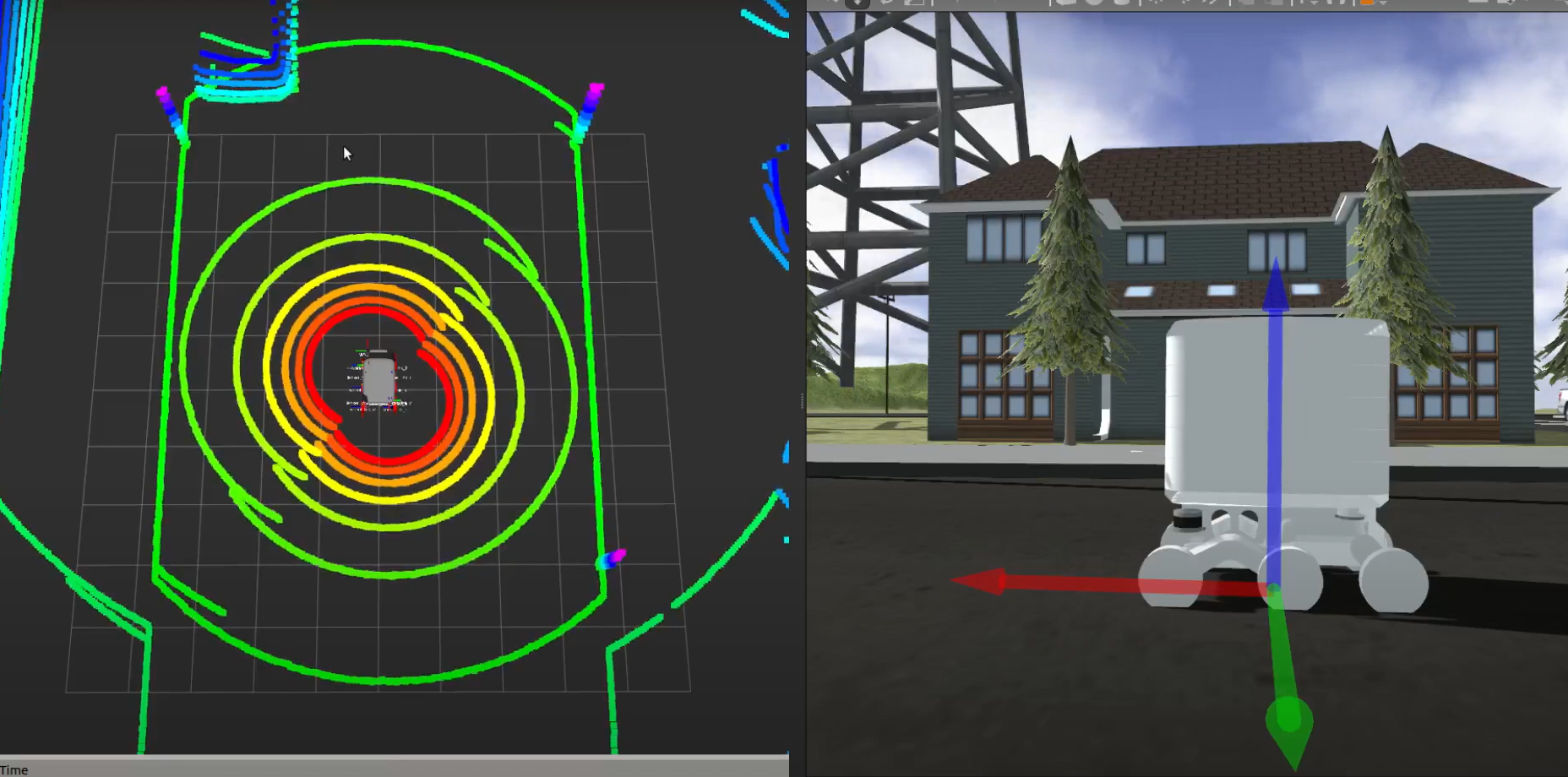

Simulation of UrbANT robot with rocker-bogie syspension system and damping effect.
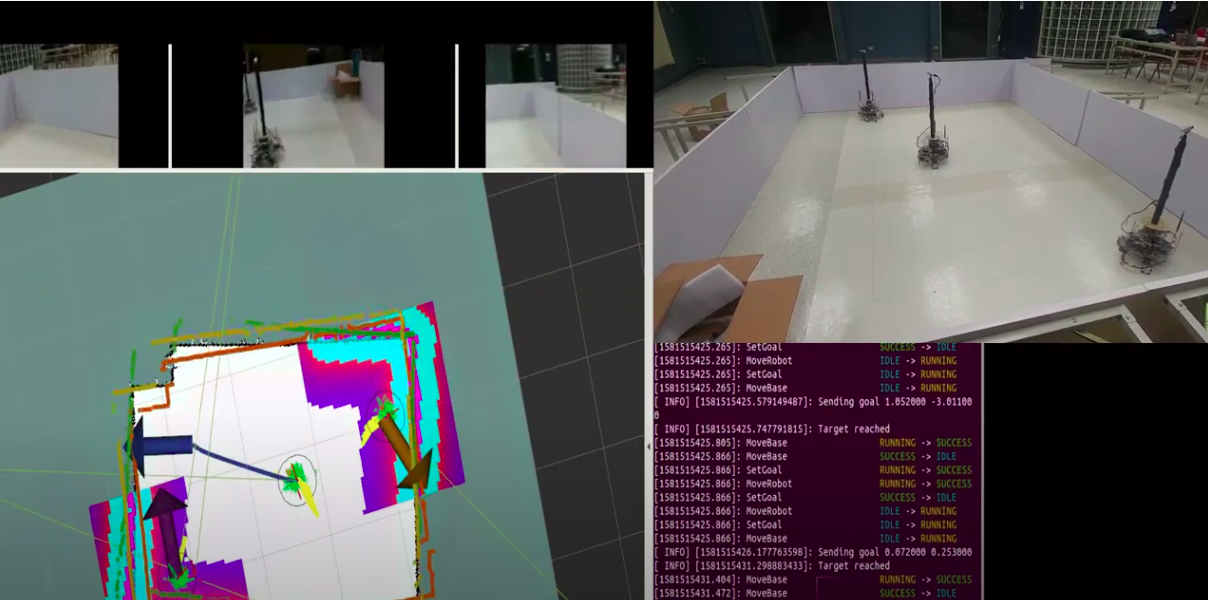
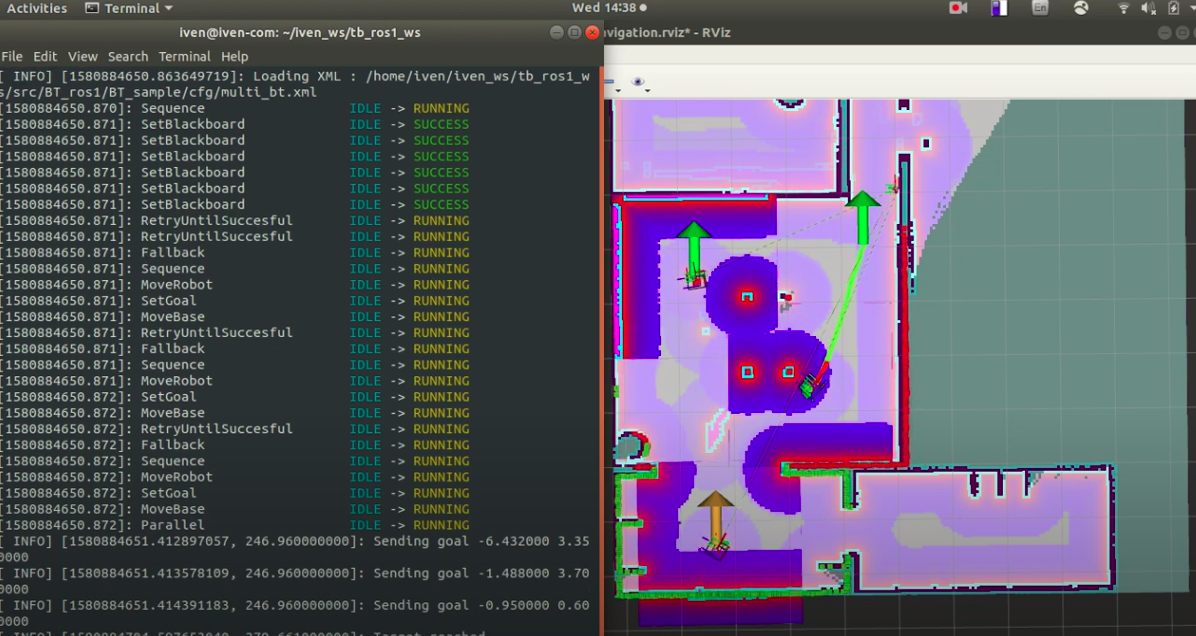
Adapted hdl_localization and navgraph to UrbANT. Users are able to set goals to any nodes on the graph. The nodes are movable, and can be added or deleted. The paths can as well be dis/connected between nodes. All operations to nodes can be done on the 2D map (right side) or on the camera view (left side).
The purpose of this project is to design a noise mapping tool in MATLAB accompanied by a GUI that is responsible for simulating the noise map generated by an aircraft in the vicinity of the Düsseldorf airport. 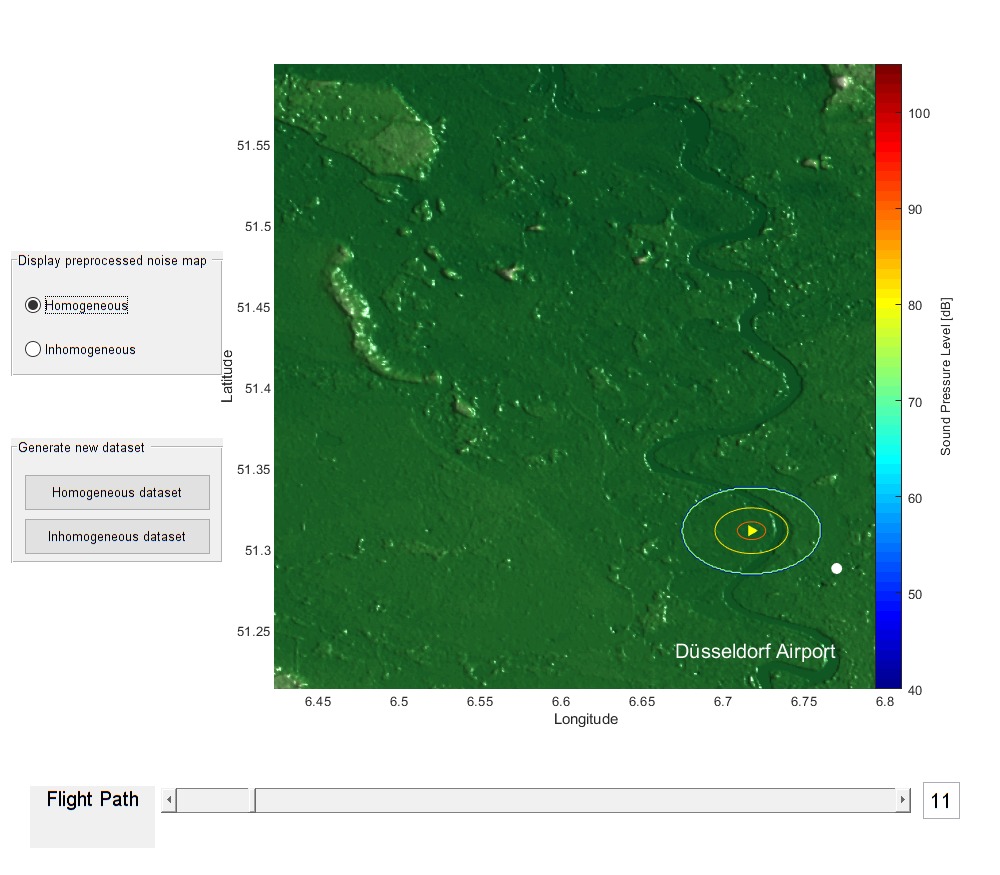
NeuronBot2 is the main task of mine as an intern. It is the latest version of NeuronBot made by ADLINK, which fully supports ROS1 and ROS2.
From this project, I learned about how a project is processed, how to negotiate and cooperate with other companies, and, of course, leveled up my coding skill.
Appreciate all my colleagues in ARPG of ADLINK. 
Published:
This is a description of your talk, which is a markdown files that can be all markdown-ified like any other post. Yay markdown!
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.